a.
Planer Patch:
The patch formed by joining points in the plane is called planer patch.
Planar patch for given question:
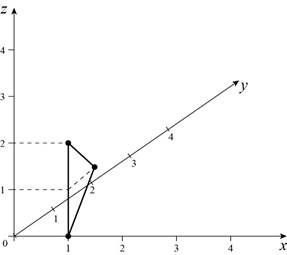
Explanation:
From the above diagram, the planer patch is parallel to “yz” plane. The points are viewed from outside of the object. So, the left most portion of the patch lies inside.
Explanation of Solution
b.
Determine a ray of light originating at the point (2, 0, 0):
The 3D plot of the patch with the point (2, 0, 0) is shown below:
Explanation of Solution
c.
Determine a ray of light originating at the point (2, 1, 1):
The 3D plot of the patch with the point (2, 1, 1) is shown below:
Explanation of Solution
d.
Determine a ray of light originating at the point (3, 2, 1):
The 3D plot of the patch with the point (3, 2, 1) is shown below:
Want to see the full answer?
Check out a sample textbook solution
Chapter 10 Solutions
Computer Science: An Overview (13th Edition) (What's New in Computer Science)

- Using Matlab computer software, write the code to represent the next surface given by the following equation (put the title, axes and legend of the surface on the obtained graph) x² + y2 – 2x – 6y – z + 10 = 0 (You can use a set of values between -5 to 5).arrow_forwardSuppose we construct two quaternions 91 and 92 which rotate about the same unit vector. The angle of rotation for 91 is 79 degrees and the angle of rotation for 92 is 158 degrees. To perform spherical linear interpolation between the two quaternions using sin(to) slerp(t, 91, 92) sin((1 − t)0) sin(0) 91 + 92 sin(0) what angle should be used for 0? If you are not sure, consider building two quaternions using the above angles and working through the problem...The answer should be expressed as a number of degrees.arrow_forwardConsider a room with world coordinate system U-V-W as shown. Two cameras are mounted in the room, forming a stereo pair. The world coordinate origin is in one corner of the room, with UV-W axes shown. The "Left" camera Cl is located at world coordinates (10,1,3) and it's xl-yl-zl axes are oriented as shown. The "Right" camera Cr is located at world coordinates (7.1,2) and its xr-yr-zr axes are oriented as shown. Both cameras have a focal length of 1. U (1) What is the 3x4 matrix that maps 3D points in world coordinates into 2D points in film plane coordinates (when points are represented as homogeneous coordinates), for the left camera CI? (2) What is the 3x3 essential matrix for the two cameras, treating them as a stereo pair where Cl is the "left camera" and Cr is the "right" camera?arrow_forward
- Please follow the steps precisely That is shown in the imagearrow_forwardWirte a matlab code to plot the 3D image of a helix: Use the following parameters and equations that define the axes in 3D: p=0.199; Pitch distance (distance between the turns)a=0.02999500; Radius of the helis wireb=0.191; Radius of the helixn = 5, is the number of helis turns. δ = atan(p/(2*pi*b)); The pitch anglex’ = b + a cos(Ө)y’ = -a sin(Ө) sin(δ)x = x’ sin(ф)+y’ cos(ф);y =-x’ cos(ф)+y’ sin(ф);z = p*ф/(2*pi)+a*sin(Ө)*cos(δ);arrow_forwardIf there are two equal angles in a given triangle, then their corresponding opposite sides must be equal.arrow_forward
- Complete the transititon function in the image:arrow_forwardGive a general expression for the perpendicular distance from a point (x, y) to a line that passes through (To, yo) and (x1, y₁). Show transcribed image textarrow_forwardA. Translate a polygon with coordinates A(2,5), B(7,10),C(10,2) by 3 units in X direction & 4 units in Y direction. B. Perform a scaling(S) in x direction Sx=3 and y direction Sy=2 and translate(T) on x direction Tx=3 on a polygon(P) with coordinates A(4,7), B(8,3),C(6,8). C. Can we represent a translation with reflections? If so, Explain how?arrow_forward
- please solve in matrix form (computer graphics) Translate object ABCD with co-ordinates A(0, 0, 0), B(3, 0, 0), C(3, 3, 3), D(0, 3, 0) by 2 units in all direction and then scale it by 1 units in x direction and - units in y direction and no change along z-direction about (1, 2, 1). 4arrow_forwardProblem 3: The histograms of two images are illustrated below. Sketch a transformation function for each image that will make the image have a better contrast. Use the axis provided below to sketch your transformation functions. 1/128 1/200 64 192 255 100 155 255arrow_forwardsolve the problem given in the image.arrow_forward
 Database System ConceptsComputer ScienceISBN:9780078022159Author:Abraham Silberschatz Professor, Henry F. Korth, S. SudarshanPublisher:McGraw-Hill Education
Database System ConceptsComputer ScienceISBN:9780078022159Author:Abraham Silberschatz Professor, Henry F. Korth, S. SudarshanPublisher:McGraw-Hill Education Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON
Starting Out with Python (4th Edition)Computer ScienceISBN:9780134444321Author:Tony GaddisPublisher:PEARSON Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON
Digital Fundamentals (11th Edition)Computer ScienceISBN:9780132737968Author:Thomas L. FloydPublisher:PEARSON C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON
C How to Program (8th Edition)Computer ScienceISBN:9780133976892Author:Paul J. Deitel, Harvey DeitelPublisher:PEARSON Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning
Database Systems: Design, Implementation, & Manag...Computer ScienceISBN:9781337627900Author:Carlos Coronel, Steven MorrisPublisher:Cengage Learning Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education
Programmable Logic ControllersComputer ScienceISBN:9780073373843Author:Frank D. PetruzellaPublisher:McGraw-Hill Education