ENGINEERING DESIGN PROCESS
3rd Edition
ISBN: 9781305253285
Author: HAIK
Publisher: CENGAGE L
expand_more
expand_more
format_list_bulleted
Videos
Textbook Question
Chapter 6.11, Problem 15P
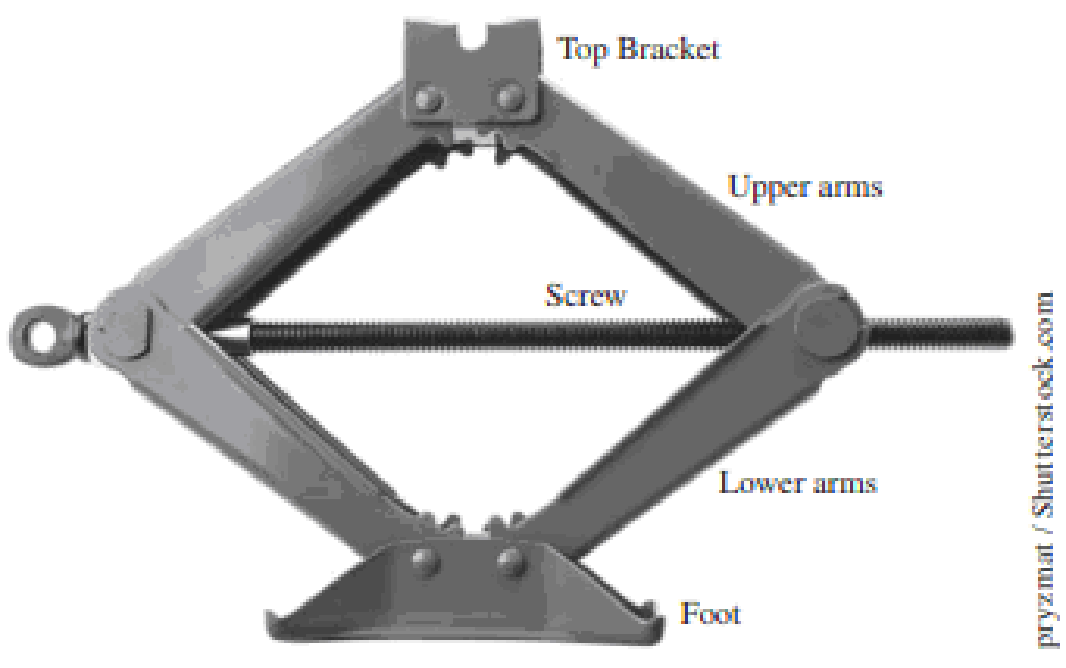
Establish the function tree of a car scissor Jack.
Expert Solution & Answer

Trending nowThis is a popular solution!

Students have asked these similar questions
solver question complketly
Power Engineering - ABEN 3411
Illustrate and discuss the principle of operation for diesel and gasoline engine.
Using signavio or any PBM tools and must Use pool and lane and object.
Model the following business process at a supplier. After a supplier notifies a retailer of the approval of a purchase order, the supplier can receive an order confirmation, an order change, or an order cancelation from the retailer. It may happen that no response is received at all. If no response is received after 48 h, or if an order cancelation is received, the supplier will cancel the order. If an order confirmation is received within 48 h, the supplier will process the order normally. If an order change is received within 48 h, the supplier will update the order and ask again the retailer for confirmation. The retailer is allowed to change an order at most three times. Afterwards, the supplier will automatically cancel the order.
Chapter 6 Solutions
ENGINEERING DESIGN PROCESS
Ch. 6.11 - Discuss the following statement as it relates to...Ch. 6.11 - Why would it be wrong to state a mechanism of...Ch. 6.11 - What is the difference between functions and...Ch. 6.11 - Prob. 4PCh. 6.11 - As a team, choose one of the following products to...Ch. 6.11 - Prob. 6PCh. 6.11 - Prob. 7PCh. 6.11 - What is the difference between the functional...Ch. 6.11 - Prob. 9PCh. 6.11 - Prob. 10P
Ch. 6.11 - Generate a function tree for a coin-sorting...Ch. 6.11 - Prob. 12PCh. 6.11 - State whether following statements for true or...Ch. 6.11 - Establish the goal, action, function, behavior,...Ch. 6.11 - Establish the function tree of a car scissor Jack.Ch. 6.11 - Establish the function structure of an electric...Ch. 6.11 - Establish the purpose and action functions for a...Ch. 6.11 - Prob. 18P
Knowledge Booster


Learn more about
Need a deep-dive on the concept behind this application? Look no further. Learn more about this topic, mechanical-engineering and related others by exploring similar questions and additional content below.Similar questions
- throttle actuator velocity v intake pipe throttle angle (aTH) slope (a) For vehicle speed control example our control task as follow: Desired (specified) behaviour: keep vehicle speed constant Manipulation: automatically adjust gas/brake pedal position Show block diagram representation clearly.arrow_forwarda. Currently, you serve as a robotic engineer by a company, and your boss want you to design a robot in spatial space to satisfy the following conditions: i. Max reachable distance of the robot is 1 meter. ii. Only using revolute joints, connecting links and rigid load bearing links (the length of link is 0.5m). iii. The degree of freedom (Dof) of the robot is 2. What is your design, how many joints and links will you use? b. The payload of your design is 10 kg (each load bearing link can hold 5 kg, 5 kg+5 kg=10kg, the weight and payload of the connecting links will be ignored), but your boss wants your designed robots to handle 20 kg payload. How will you update your current design, and how many joints and links will you use in the new design? What is the Dof of the new designed robot.arrow_forwardI need to find the command and plot on Matlab.arrow_forward
- Using "Subjective Digital Design", please develop the Boolean equation for the problem statement given: This CNC machine controller allow operation (represented by O) of the machine if there is a part in the vice (determined by a sensor P) and the spindle is fully retracted (determined by another sensor R) or a manual override (M) button is pressed by the operator.arrow_forwardA control loop contains _______, _______, and _________.arrow_forwardThere is extensive discussion on CNC programming, as well as G codes and M codes.arrow_forward
- Course: Statics for Engineers Chapter: Ch5 ( Equilibrium of aRigid Body ) * A free-body Diagram must be included with the solution *arrow_forwardFor the following symbolic representation of a robotic manipulator arm: 1. Use the Denavit-Hartenberg (DH) convention to draw the correct coordinate frames on the diagram 2. Define the DH variables and draw them on the diagram 3. Construct and fill a DH table with variables for each joint/link.arrow_forward[2.2] Consider two different implementations of the same instruction set architecture. instructions can be divided into four classes according to their CPI (classes A, B, C, and D with a clock rate of 2.5 GHz and CPIs of 1, 2, 3, and 3, and P2 with a clock rate of 3 GHz CPIs of 2, 2, 2, and 2. Given a program with a dynamic instruction count of 1.0E6 instruc divided into classes as follows: 10% class A, 20% class B, 50% class C, and 20% cla which is faster: P1 or P2? a. What is the global CPI for each implementation? Ans. 2.6, 2.0 b. Find the clock cycles required in both cases. Ans. 26 x 105, 20 × 10³arrow_forward
- NINeveh Digital Techniques University H.W 2:Design 4:16 Decoder from 2: 4 Decoder with truth table ,Boolean Functions and Logic Diagram. ms & Control Engineering Dept. Mohammed ALSAYED stagoarrow_forwardsolve by theconcepts of ststicsarrow_forwardPlease don't copy implementation of bag of words model in rapidminerarrow_forward
arrow_back_ios
SEE MORE QUESTIONS
arrow_forward_ios
Recommended textbooks for you
 Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning
Refrigeration and Air Conditioning Technology (Mi...Mechanical EngineeringISBN:9781305578296Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill JohnsonPublisher:Cengage Learning
Refrigeration and Air Conditioning Technology (Mi...
Mechanical Engineering
ISBN:9781305578296
Author:John Tomczyk, Eugene Silberstein, Bill Whitman, Bill Johnson
Publisher:Cengage Learning
Quality Control and Quality Assurance; Author: AISC Education;https://www.youtube.com/watch?v=C2PFj9YZ_mw;License: Standard Youtube License